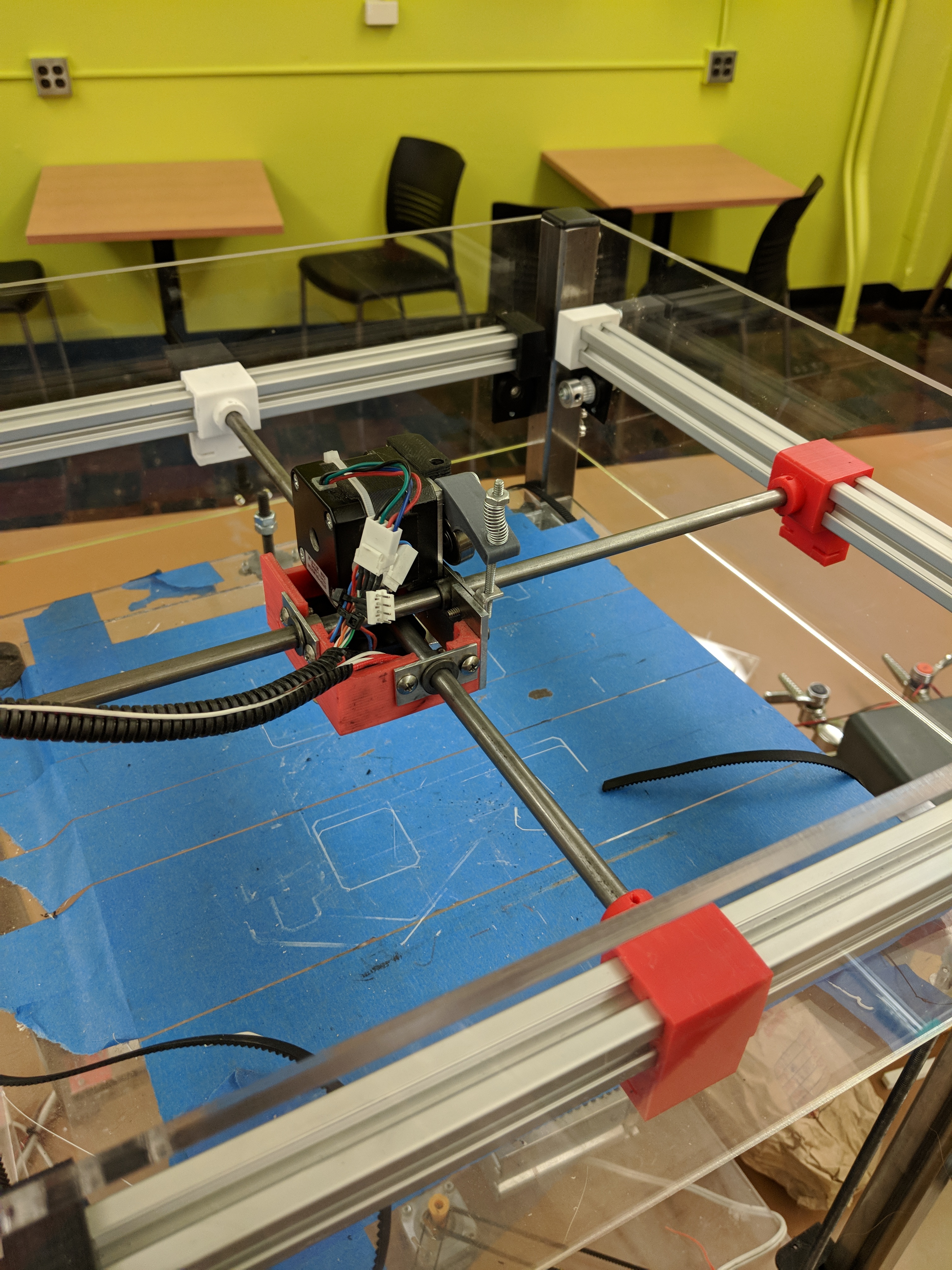
Z5 is my lastest design. I am currently still finishing this one. iot is almost complete, still checking the overall quality and calibrating it. This design introduced many new changes that ultimately make it more reliable than most printers that sell for under $1000.
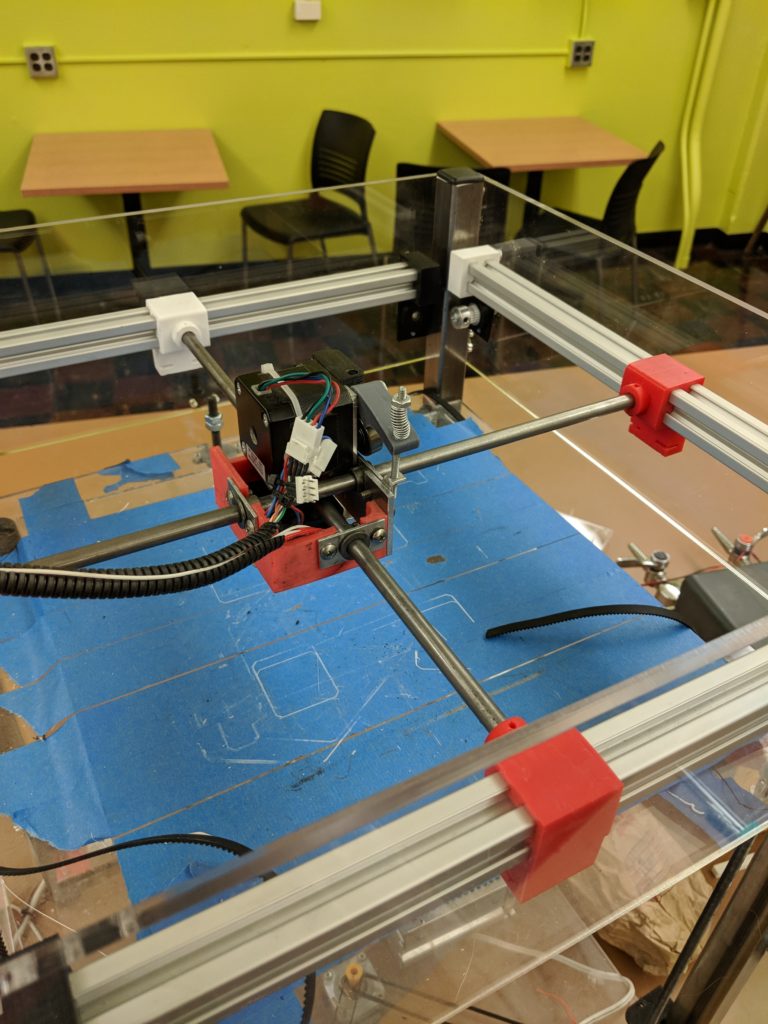
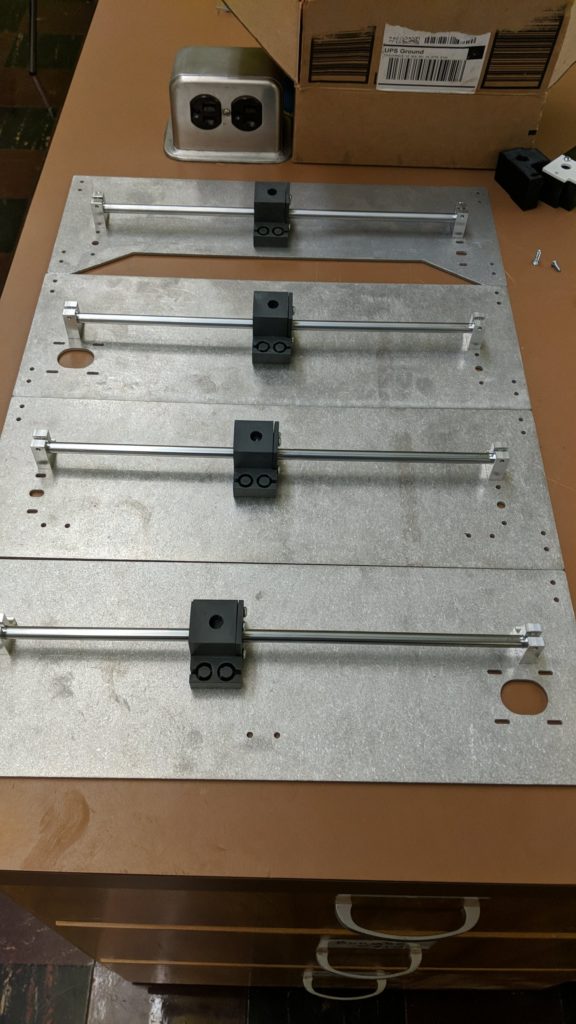
I switched the X and Y axis to linear rails with linear ball bearings. This has proven to be much greater than the Bosch.
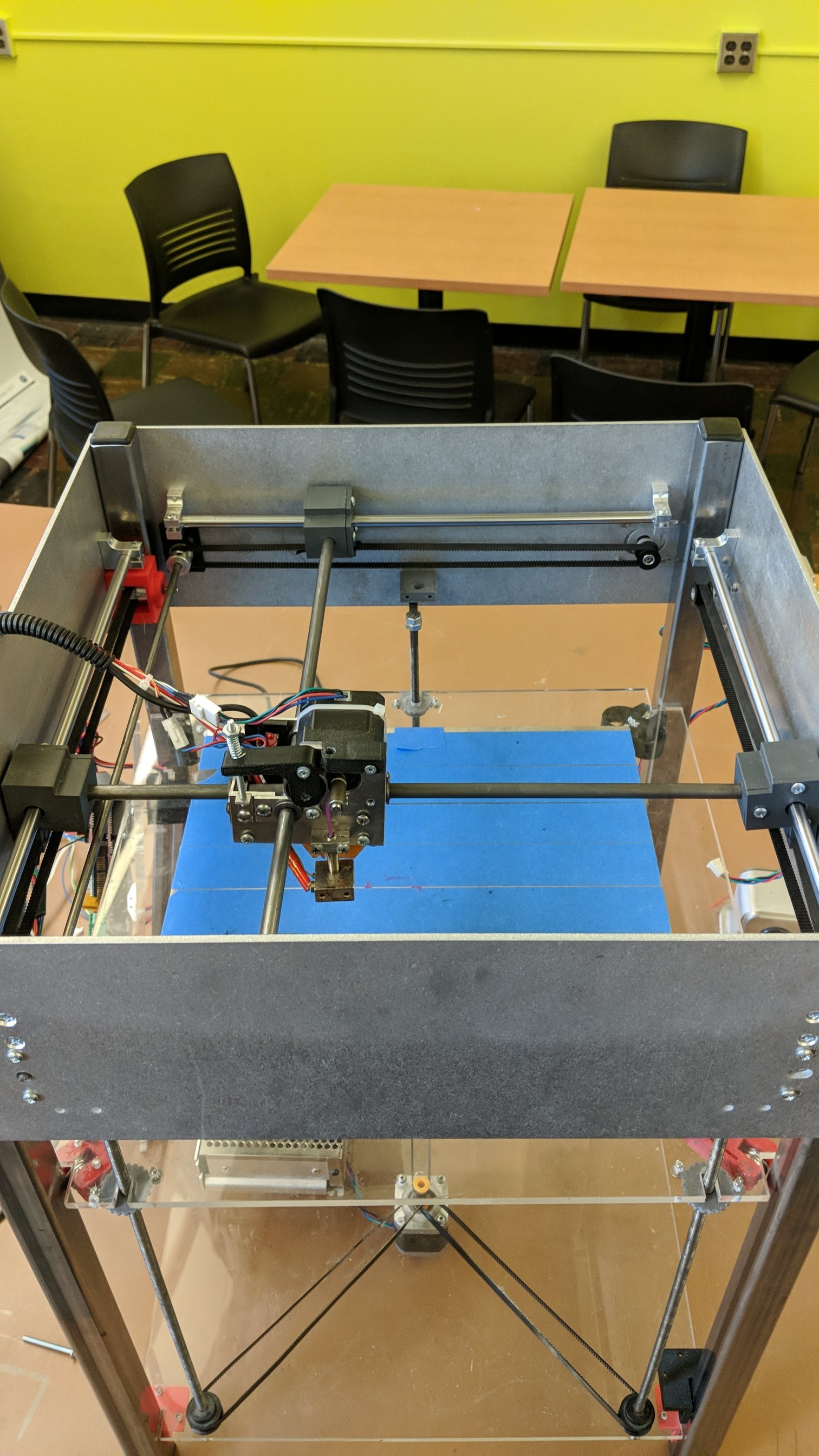
A heated bed has also been added to remove the warping and to allow me to explore more materials. Additionally, I have added a proximety senor to help with the flatness tolerance across the printing platform.
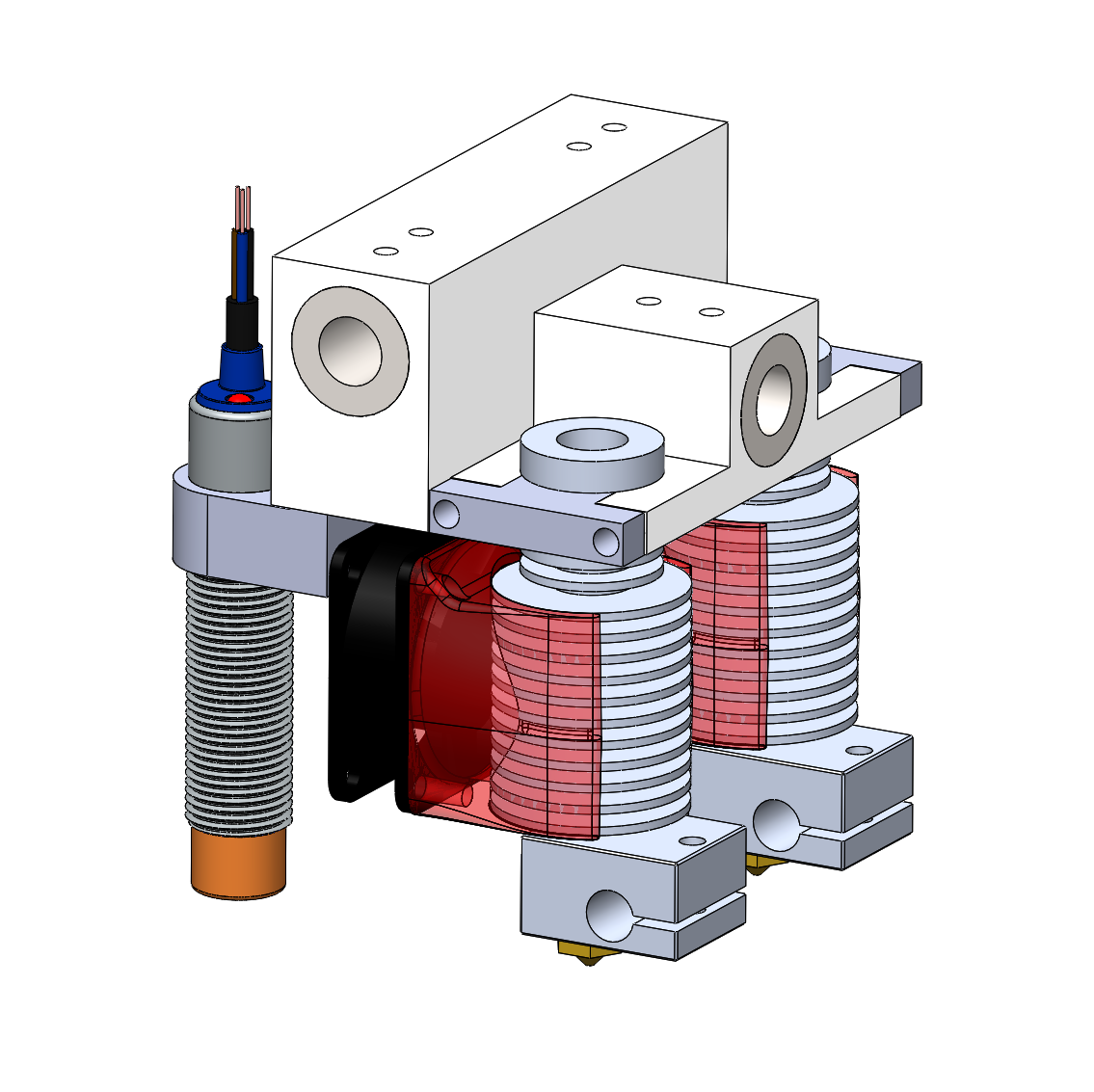
To add to the heated bed I added a bowden extruder that is all stainless steel. I decided to go this route because the bowden extruder makes the print head much lighter and easier to add multiple nozzles. I went with an all stainless steel nozzle to help with residue that may reside in the nozzle when switching between materials. To wrap up the extruder, I have also included a second nozzle for dual extrusion. I purchased the extruders because I have learned from the past designs machining my own extruders is not worth the time it takes.
The video on the left shows a test print.
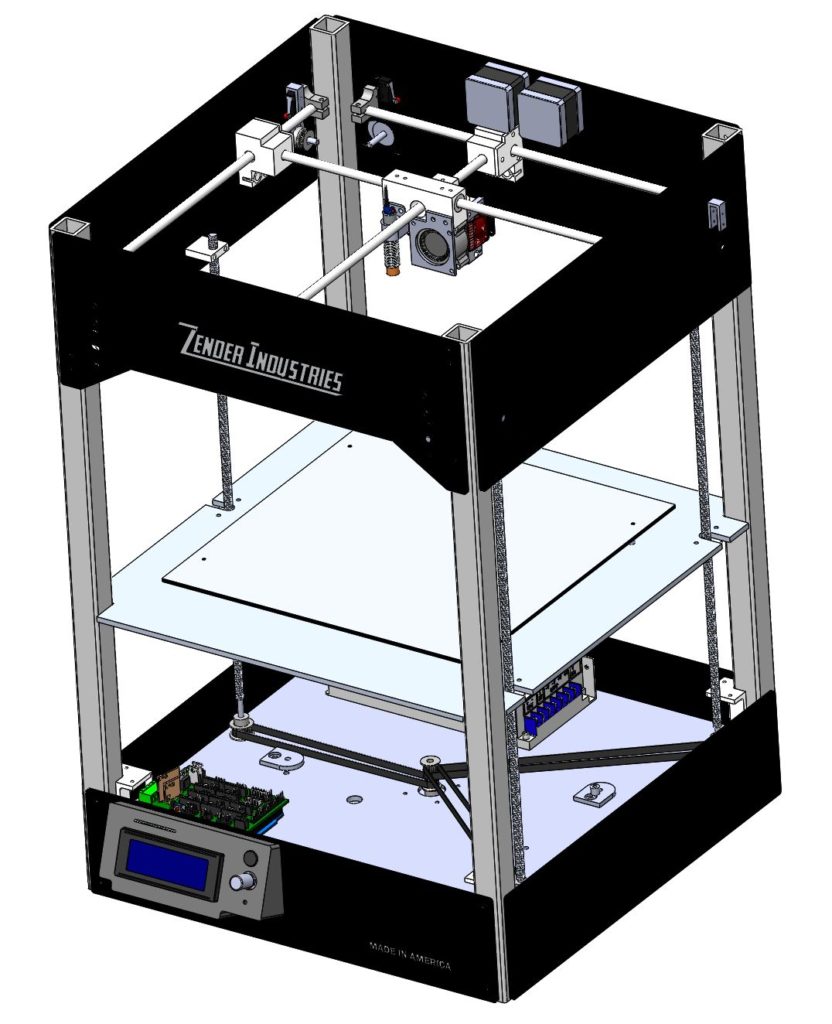
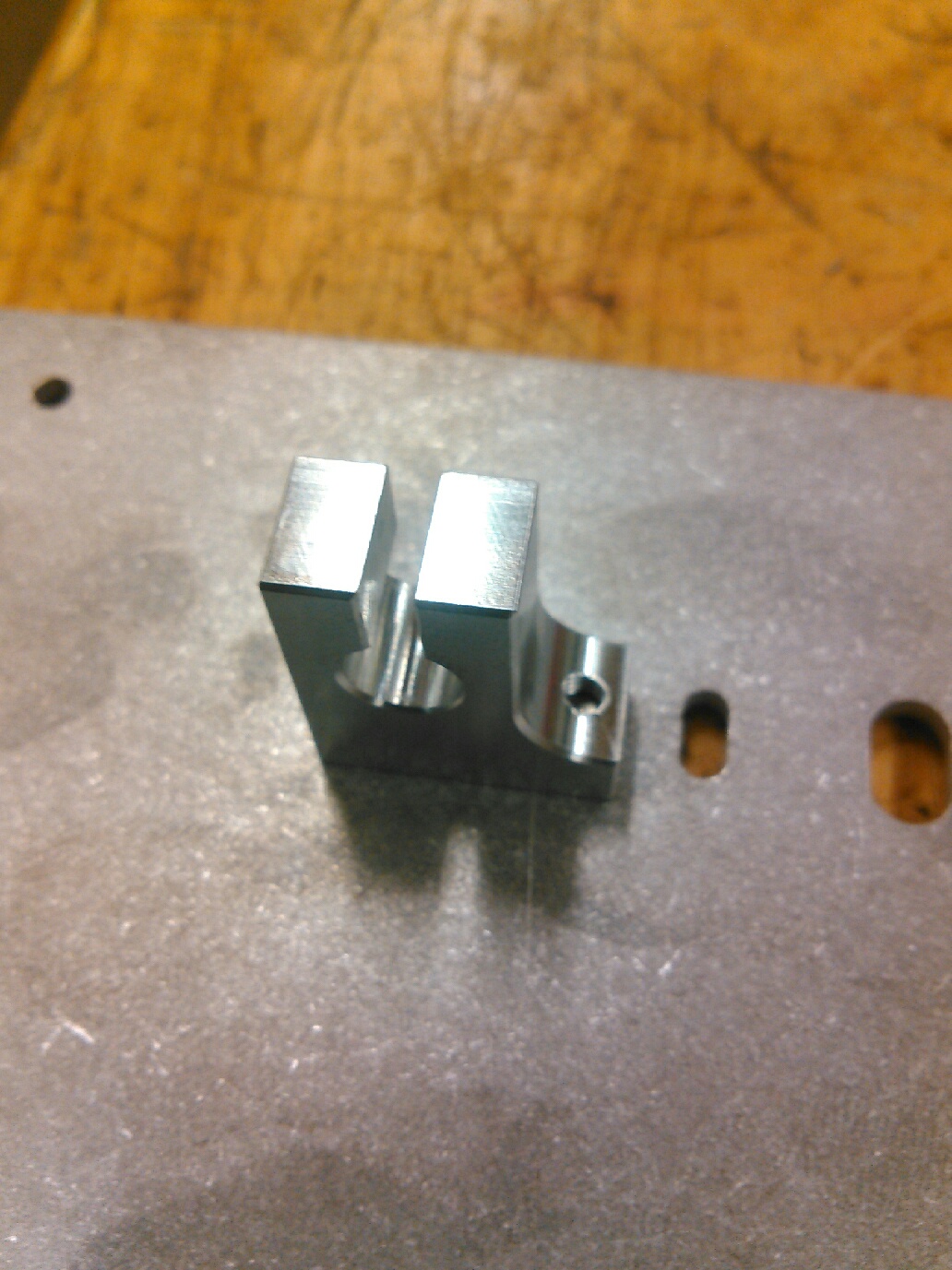
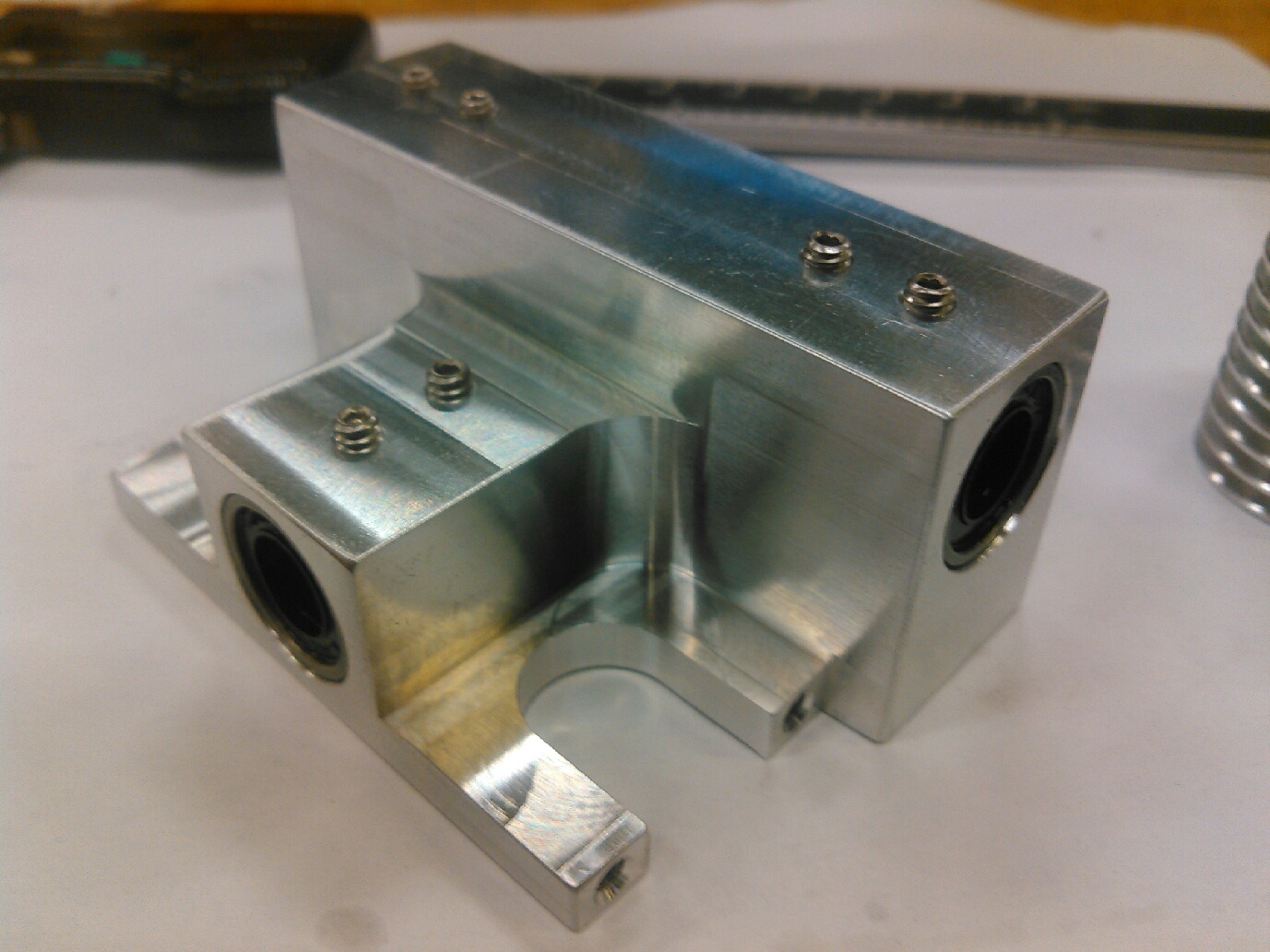
The extruder looks like the CAD design to the left.
Overall, I am very proud of this design. It certianly has shown a lot of potential to last long. I predict the linear ball bearings to be the first thing to wear out, however, that is good because they are affordable and easy to swap out,. This printer has taught me a great amount of electrical engineering. Because I used a lot of different components from before I had to be careful about the electrical schematic,